Next: Implementation of the E-M Up: PDF Estimation using Gaussian Previous: Derivation of the EM Contents
To illustrate the PDF estimation problem,
we will use some 3-dimensional features from
a mysterious source.
Samples of the feature vector
![]() were used as training data
and were stored in variable data1, which is of size
3 by
were used as training data
and were stored in variable data1, which is of size
3 by ![]() , where
, where ![]() is the number of independent samples.
Each row of the matrix stores the
samples of a different feature.
The following code segment implements the training
and displays the resulting PDF in a density plot.
is the number of independent samples.
Each row of the matrix stores the
samples of a different feature.
The following code segment implements the training
and displays the resulting PDF in a density plot.
NMODE=10;
min_std = [20 20 1.0];
names = {'Z1','Z2','Z3'};
gparm1 = init_gmix(data1,NMODE,names,min_std);
for i=1:100,
[gparm1,Q] = gmix_step(gparm1,data1);
fprintf('%d: Total log-likelihood=%g\n',i,Q);
end;
gmix_view2(gparm1,data1,1,2);
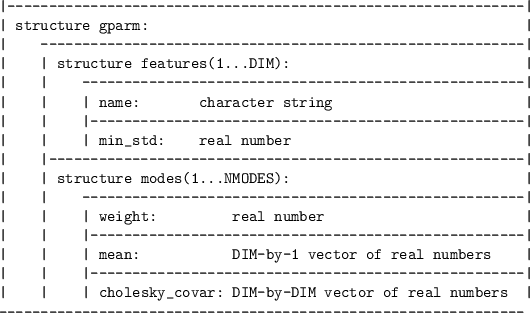
Refer to table 13.3 for symbol names.
The variable names is a cell array that stores the
feature names for use in visualization plots.
The variable min_std stores the minimum feature
standard deviations (See section 13.2.4). The routine
software/init_gmix.m creates
an initial set of parameters.
In simple problems, the mixture
can be trained by repeated calls to
software/gmix_step.mas shown. In more difficult problems,
it is necessary to do more to insure that there
are the right number of modes and that the algorithm
is converging properly.
A representative MATLAB program for training are
software/gmix_est.m and
software/gmix_trainscript.m, which in turn call
software/gmix_step.m, the subroutine that actually
implements the E-M algorithm.
We will discuss the use of
software/gmix_trainscript.m and
software/gmix_est.m in more detail
in the following sections.
Results of running the above code segment are shown
in Figure 13.1.
![\includegraphics[width=2.1in,height=2.1in, clip]{h1h3a.eps}](img1418.png)
![\includegraphics[width=2.1in,height=2.1in, clip]{h1h3b.eps}](img1419.png)
![\includegraphics[width=2.1in,height=2.1in, clip]{h1h3c.eps}](img1420.png)
|
Before iterating, a starting point is needed
for the GM parameters. This is handled by
software/init_gmix.m.
This routine inputs
some samples of data vectors
![]() ,
the number of GM terms to use (
,
the number of GM terms to use (![]() ),
the covariance conditioning parameters
),
the covariance conditioning parameters
![]() , and the names of all the features.
The GM component means
, and the names of all the features.
The GM component means
![]()
![]() are initialized to randomly
selected input data samples.
The covariances are initialized to
diagonal matrices with large variances.
It is important to use variances on the order
of the square of the data volume width
are initialized to randomly
selected input data samples.
The covariances are initialized to
diagonal matrices with large variances.
It is important to use variances on the order
of the square of the data volume width
![]() .
The size of the variances at initialization determines
the data “window" through which each GM component “sees"
the data. Too small a window at initialization
can lock the algorithm into the wrong local minimum
of the likelihood function.
The initial weights
.
The size of the variances at initialization determines
the data “window" through which each GM component “sees"
the data. Too small a window at initialization
can lock the algorithm into the wrong local minimum
of the likelihood function.
The initial weights ![]() are set to be all equal.
are set to be all equal.
There are two approaches to determining the number of modes. The first is to sprinkle a large number of modes throughout the data volume and remove the weak or redundant ones as it converges. The second approach is to start with just one mode and add modes as needed. The way you determine if a new mode is needed (by splitting an existing mode) is by a skew or kurtosis measure (software/gmix_kurt.m). These two methods, called top-down and bottom-up, respectively will be covered in section 13.2.5.